Managing big simulation data for inverse problems with autoencoders
Major Activities
Major Activities
Last year we showed that we were able to use an autoencoder to compress the state solutions of a time-dependent PDE, u(t), significantly saving on storage cost, and then retrieve these solutions by passing the compessed state through the decoder portion with high accuracy (5% average relative error). For extreme-scale inverse problems, it is not possible to store all of the states in memory at once. A traditional approach to mitigating this memory constraint is to employ a checkpointing strategy whereby a select few timesteps are stored and the others discarded. When a discarded timestep is needed, it can be recreated by resolving the PDE starting at the nearest previous checkpoint. Since solving high dimensional PDEs can be a time consuming task, we propose to use an autoencoder approach to compress all timesteps, allowing a representation of the entire state to be stored in memory at once. When a timestep is needed, the decoder portion of the DNN is used to decompress the timestep. This year we showed that such an autoencoder compression strategy is indeed a viable alternative to the checkpointing strategy, resulting in inverse solutions that have minimal degradation due to perturbations in the state due to compression losses and that the cost of compression/decompression is lower than the cost of additional solves of the PDE for well-chosen neural network architectures. For a Gauss-Newton optimization method, the compressed states are used in each of the adjoint, incremental forward, and incremental adjoint PDE solves, resulting in significant time-savings over the course of solving the inverse problem.
One particular advantage of this method is that it scales perfectly. The proposed method holds the local (per MPI rank) problem size constant and assigns one instance of the autoencoder to each MPI rank with no communication between ranks required to compress/decompress. Such a strategy makes this method particularly effective on large problems as the cost of recomputing the PDE solution becomes increasingly dominated by communication costs.
Significant Results
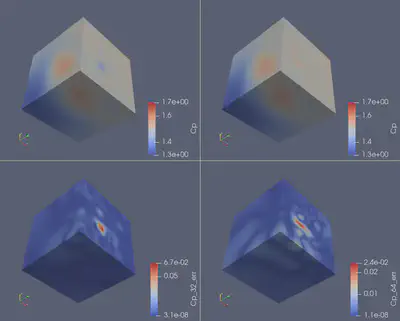
Relative error of the parameter of interest Cp for two different compression levels. The local state size is 4096 and compressed size is 32 (left) and 64 (right). This is equivalent to a compression level of 128x and 64x, respectively. The top row shows the predicted value of Cp and the bottom row shows the relative error. The average relative error is 0.2% with 128x compression and 0.1% with 64x compression. In this example, there were 64 MPI ranks, leading to a total state size of 262,144. Using GPU, we get a 40% speedup over recomputing the forward solution and 20% speedup when using CPU only. These results have been tested and show to hold parameters with over 16 million DoFs which was run on 4096 processes.